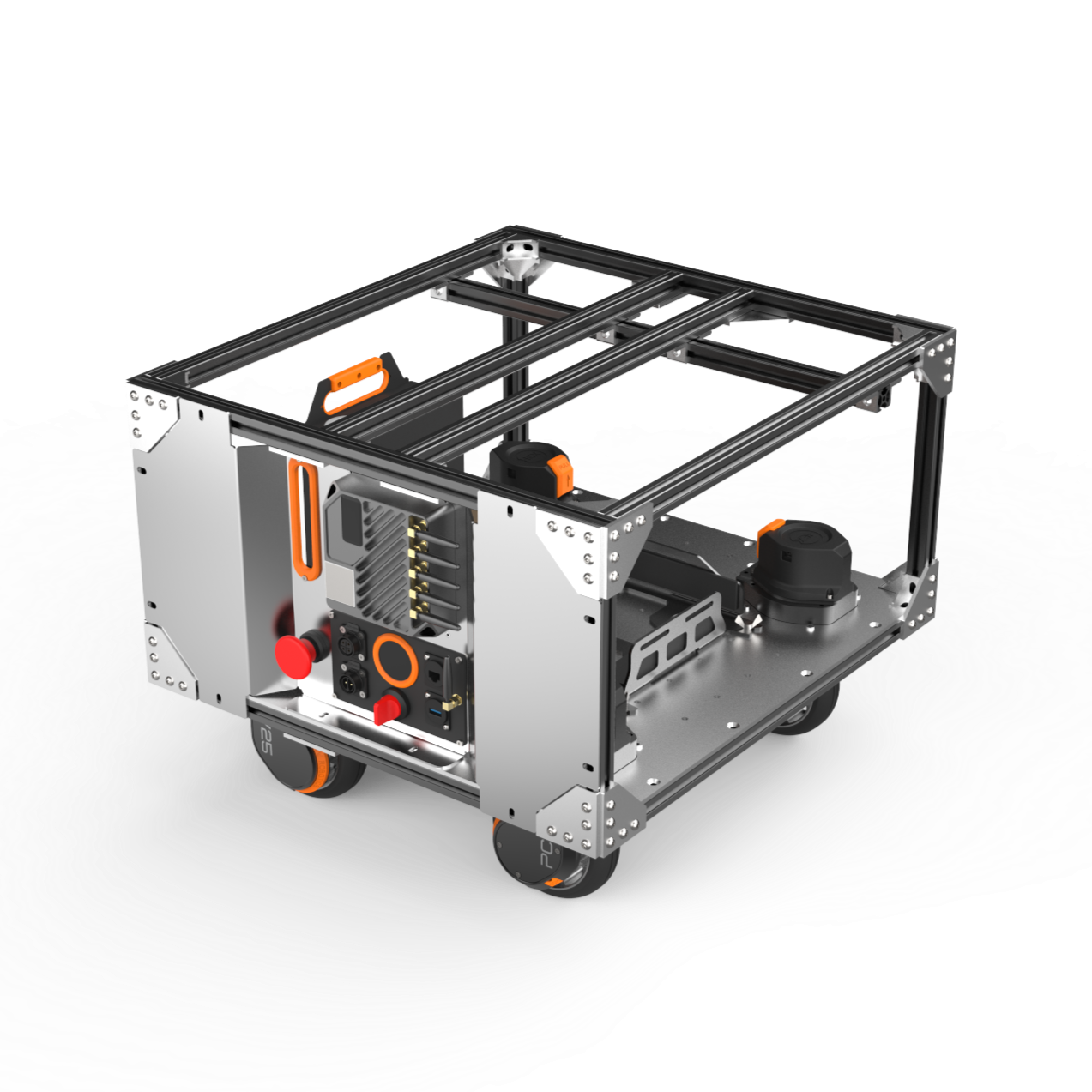
MAVER-L4 is an open-source four-wheel steering omnidirectional mobile base. Equipped with the PCW-25 module, it integrates an IMU and attitude fusion module to deliver high-precision trajectory tracking. The base adopts an aluminum profile frame structure, supporting dimension customization to meet user requirements. With a removable battery design for easy replacement, this platform is purpose-built for early-stage development and prototyping applications.
Inspired by the open-source [TidyBot++ design](https://tidybot2.github.io)









Parameter